![KOROBO Lite(コロボライト) [ MR-006 ]](/product/assets_c/2019/01/MR006_product-thumb-960xauto-1641.jpg)
![KOROBO Lite(コロボライト) [ MR-006 ]](/product/assets_c/2019/01/MR006_product-thumb-480x480-1641.jpg)
![KOROBO Lite(コロボライト) [ MR-006 ]](/product/assets_c/2019/01/MR006_parts-thumb-480x480-1642.jpg)
| 製品型番 | MR-006 |
|---|---|
| 参考価格 | 3,410 円(税込) [税抜 3,100 円] |
光センサー2個、モーター2個を搭載した、コンパクトなプログラミングカーです。
コネクターの差し替えだけで簡単にセンサーの位置を変更でき、障害物検出カー、床検出カー、ライントレースカーとして幅広く制御を楽しむことができます。
プログラミングは専用ソフトウェア「Palette IDE」(パレットアイディーイー)を使い、アイコンを並べるだけで簡単に作成できます。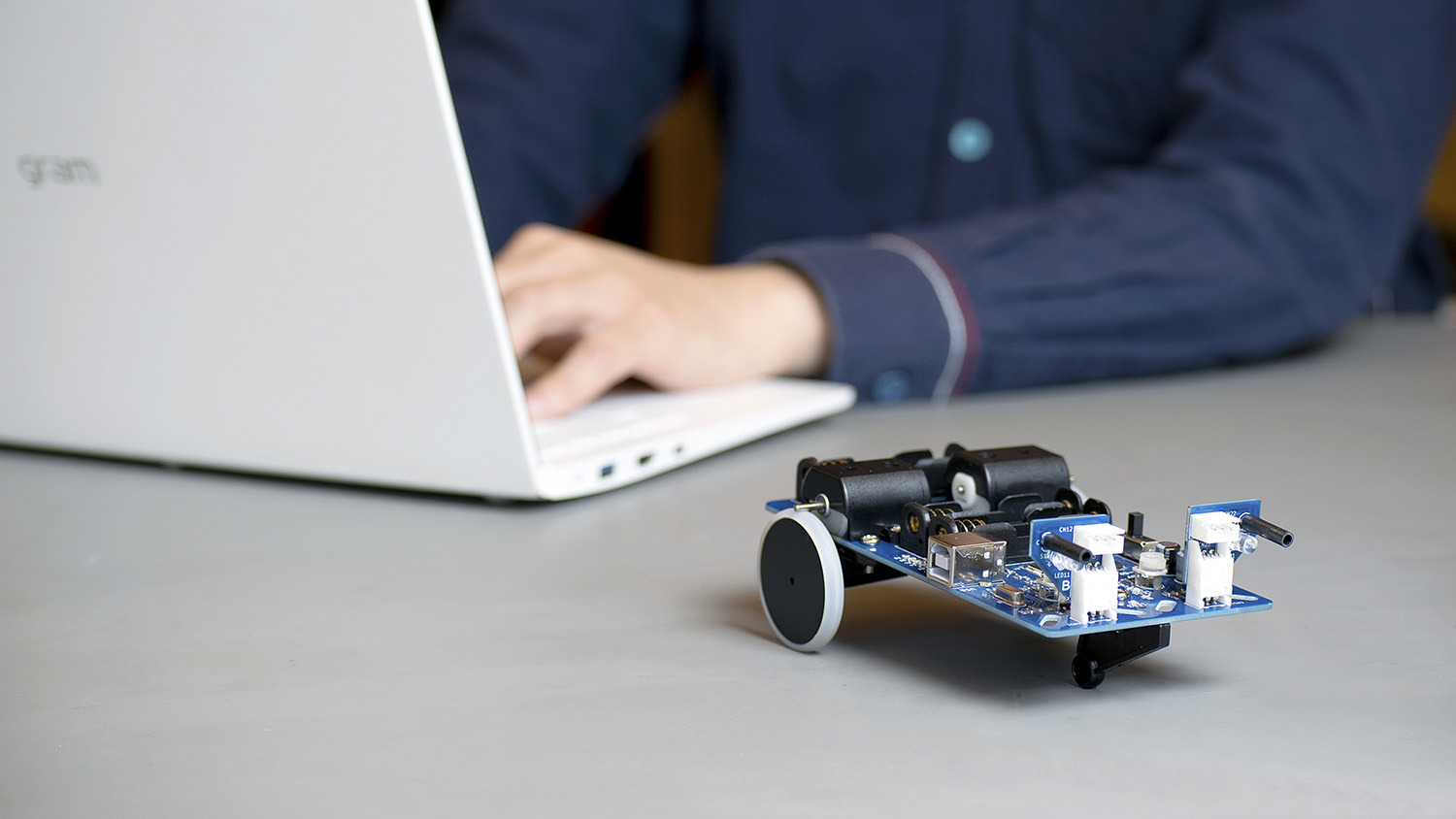
シンプル機構で組み立て簡単!
電子部品は基板に全て実装済み。わかりやすい説明書に沿って本体の組立を終えたら、障害物検出カー、床検出カー、ライントレースカーから好きなタイプを選択、センサー基板を本体基板のコネクターに適切な位置・向きに差し込み、組立完了です。
組立行程を出来る限りシンプルにすることで、プログラミングの学習により長い時間を割けるよう配慮しています。
センサーの向きを変えて手軽にロボット制御を体験!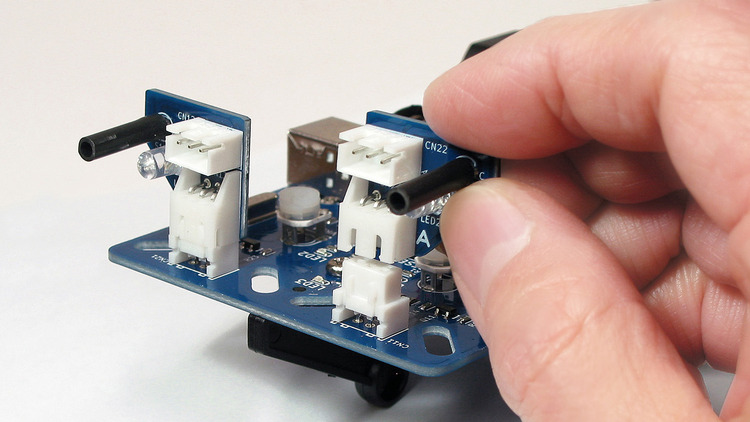
センサー基板の取り付けパターンは全部で3種類。
センサーの向き(前向き・下向き)、センサー同士の間隔(近づける・離す)によってロボットの性質が変化します。
コネクター式なので取り付け・取り外しがカンタン!手軽に3種類の制御を体験できます。
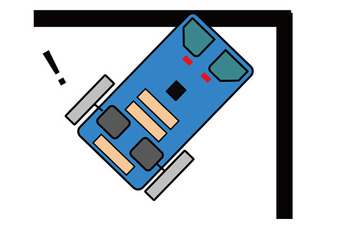
制御例① 障害物検出カー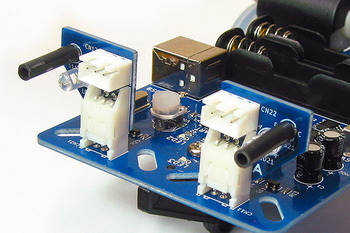
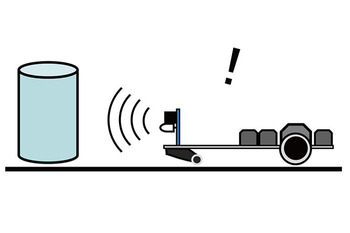
センサーを前向きに取付けると、正面にある障害物を検出する障害物検出カーになります。
受光部で光を認識するかどうかで正面に障害物があるかどうかを判断し、方向転換します。
制御例② 床検出カー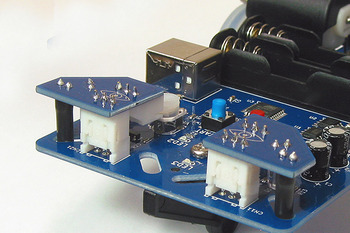
センサーを下向きに離して(ボディ外側に)取付けると、床検出カーとなります。
受光部で光を認識するかどうかで床の有無を判断し、床がない場合はバックして落下を回避します。
制御例③ ライントレースカー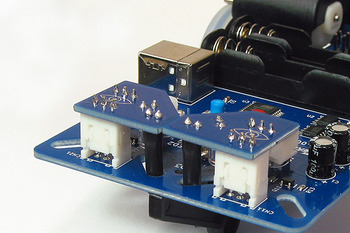
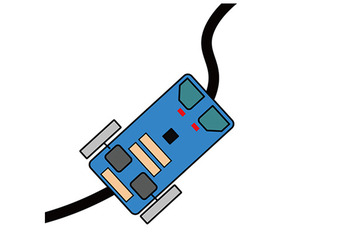
センサーを下向きに近づけて(ボディ内側に)取付けると、ライントレースカーになります。
2つのセンサーでラインを挟む位置にロボットを配置、左右のセンサーで黒い線を検出して方向を微調整しながら進みます。
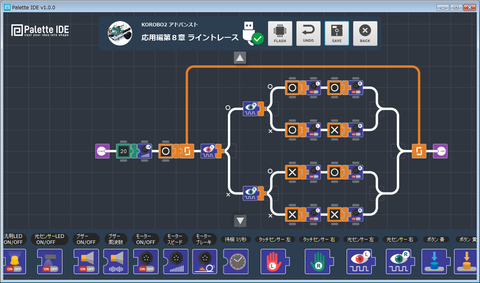
プログラミングソフトウェア![]()
自律型ロボットを制御(コントロール)するには難しい知識が必要ですが、ひとつひとつの命令をアイコンにして初心者でも簡単にプログラミングできるようにと開発したのが、専用ソフトウェアの『Palette IDE(パレット・アイディーイー)』です。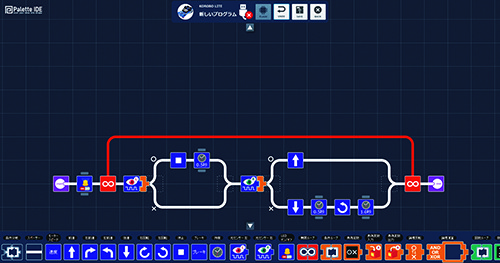
プログラミングはカードを並べるように、カラフルなアイコンを並べるだけ。あとは、自分の作りたいロボットの状況に合わせて、命令文を考え条件設定を行います。
当ソフトウェアは、パソコン上で動作するソフトウェアやUSB接続に使われるデバイスドライバーのインストールは一切不要です。
そのため、学校や公共施設など、使用者が管理者権限を持つことが難しいところでも簡単に導入していただくことができます。
【本体仕様】
| 使用電源 | 単4乾電池×3本(別売/アルカリ乾電池推奨) |
| 付属センサー | 光センサー×2 |
| 出力 | モーター×2 |
| 完成時サイズ | W85mm×H50mm×D140mm |
| 重量 | 約130g |
| 付属品 | USBケーブル |
【専用ソフトウェア「Palette IDE」動作条件】
| 対応OS | Windows 8 / 8.1 / 10 / 11 、 MacOS 10.10~10.15 / 11 / 12 |
| ディスプレイ | 1280×720以上の解像度 |
| 転送方法 | USB2.0(パソコンにUSBポートが必要。パソコン側にフルサイズTYPE-Aコネクタのない機種の場合は変換アダプタ等必要) |
| 備考 | タッチパネルに対応していないPC上で操作する場合には、 キーボード、マウス等のポインティングデバイスを有すること 音声再生機能を使用するには、ソフトウェアMIDIの再生ができること |
授業やワークショップでご活用いただけるスライドデータを用意しております。
組み立てのポイントや、部品や機能の解説を記載しております。授業・ワークショップでご利用ください。
・「KOROBO Lite(MR-006)」組み立てガイド(すぐ読めるPDF版)
専用コースデータ
No.1 ギリギリまで近付いて停止
No.2 障害物を避けよう
No.3 街でおつかい
No.4 ライン上を走ろう
| PaletteIDE操作説明書 MR-006編 | PaletteIDEを使うための操作説明書です(MR-006版) |
|---|---|
| ・「KOROBO Lite(MR-006)」組み立てガイド(すぐ読めるPDF版) |  |
| No.4 ライン上を走ろう | 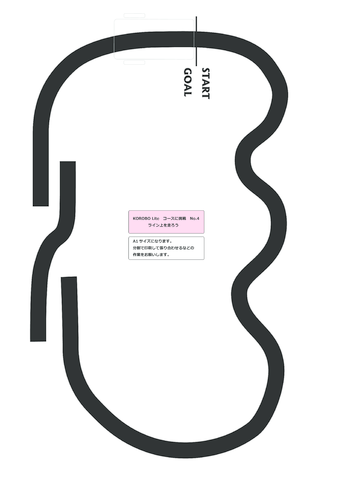 |
| No.3 街でおつかい |  |
| No.1 ギリギリまで近付いて停止 | 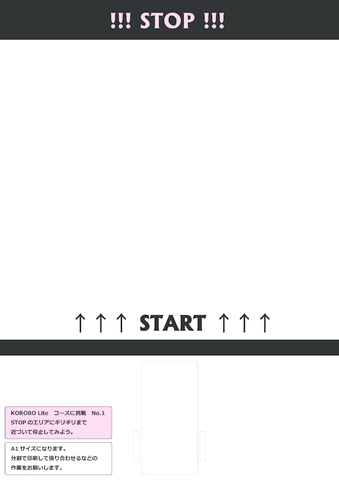 |
| No.2 障害物を避けよう |  |