赤外線ボールセンサーモジュール(MR-9162)はKOROBO2(MR-9192)・KOROBO3(MR-9193)でも使うことが可能です。

KOROBO2にボールセンサーを接続するときは、ボールセンサーのCN1をKOROBO2メイン基板のPHOTO Rに、ボールセンサーのCN2をKOROBO2メイン基板のPHOTO Lに接続します。
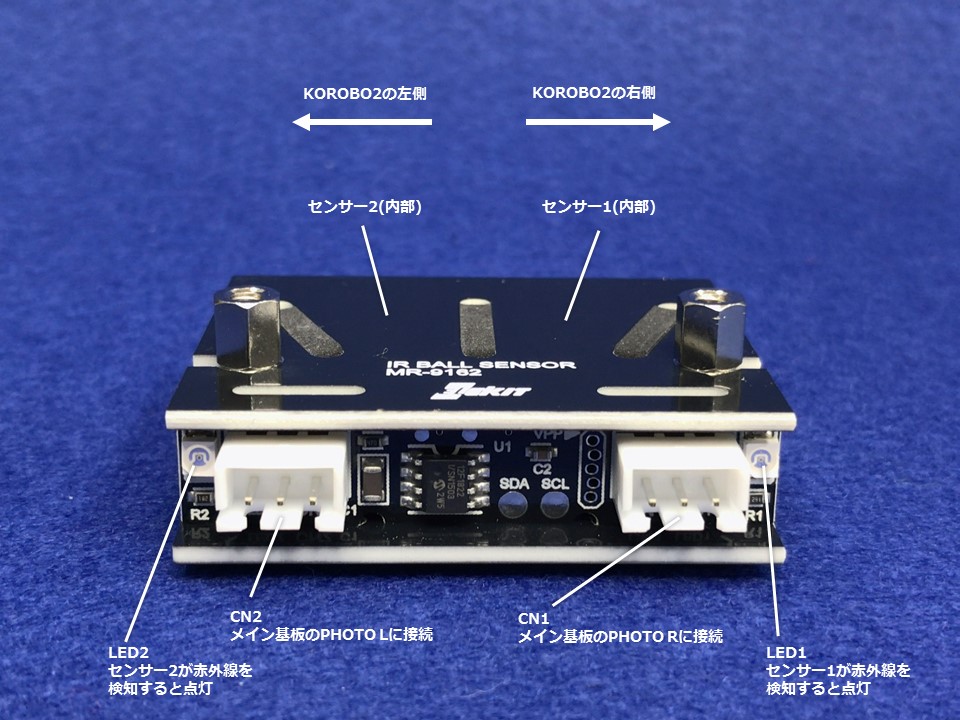
ボールセンサーとKOROBO2メイン基板を接続するときは付属のケーブル(片側が3ピン、もう片側が4ピンになっている)を使います。
3ピン側をボールセンサーに、4ピン側をKOROBO2メイン基板に接続します。

赤外線ボールセンサーモジュール(MR-9162)を使って赤外線ボールを探して追いかけるプログラムを下図に示します。
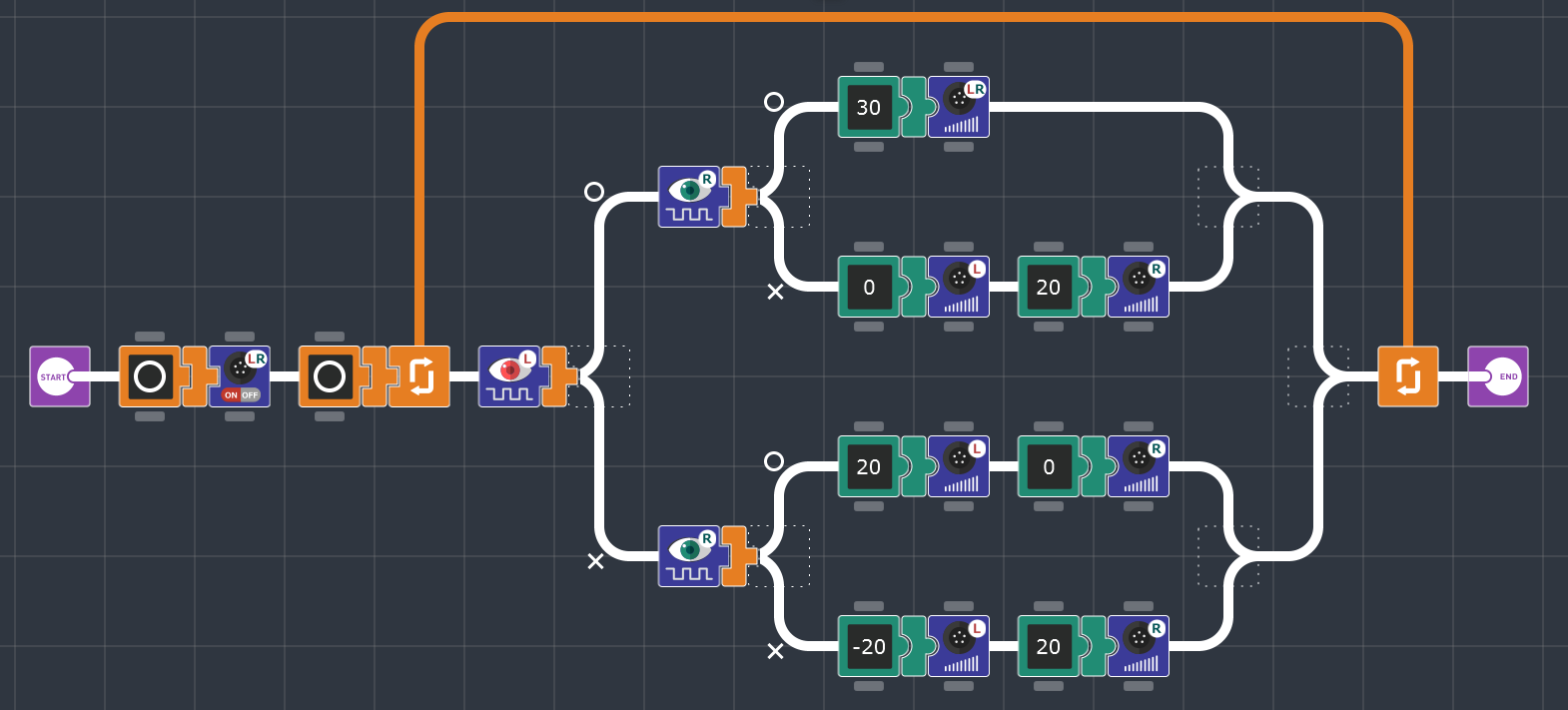
ボールセンサーはPHOTO L, PHOTO Rに接続されているので、Palette IDEでは光センサー(左)と光センサー(右)のアイコンを使います。
このプログラムでは、光センサー(左)がボールセンサーのCN2(KOROBO2の左側)、光センサー(右)がボールセンサーのCN1(KOROBO2の右側)となります。
条件分岐で4パターンの動きをしますが、上から
・ボールセンサー(左右両方)が赤外線を検知したら、前進
・ボールセンサー(左のみ)が赤外線を検知したら、左旋回
・ボールセンサー(右のみ)が赤外線を検知したら、右旋回
・ボールセンサー(左右両方)が赤外線を検知しなかったら、左回転
の動きをするプログラムとなっております。