ターゲットのショット弾をキャッチするセンサーは、下の写真の真ん中の丸い部分です。
このため、ロボット本体とターゲットの距離が近いとき、ターゲットをロボット本体と同じ床に置いた状態では、ロボット本体のショット弾発射部分(顔の前の筒の部分)とターゲットのショット弾キャッチ部分の高さが合わないため、ターゲットがショット弾をキャッチできません。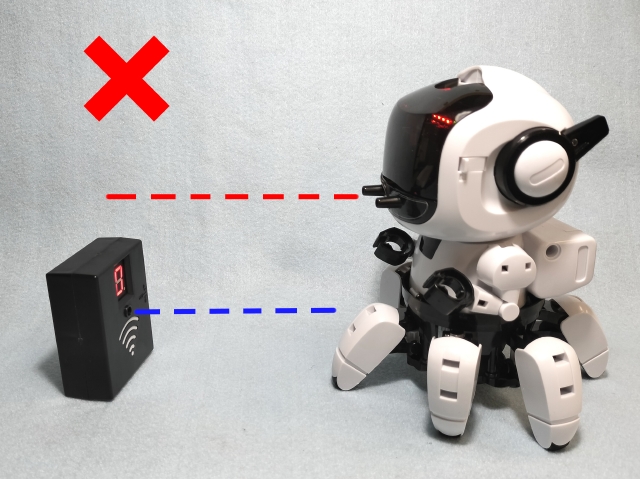
下の写真のように、ターゲットの下に台を置くなどして、ロボット本体のショット弾発射部分と、ターゲットのショット弾キャッチ部分の高さが同じくらいになるようにしてください。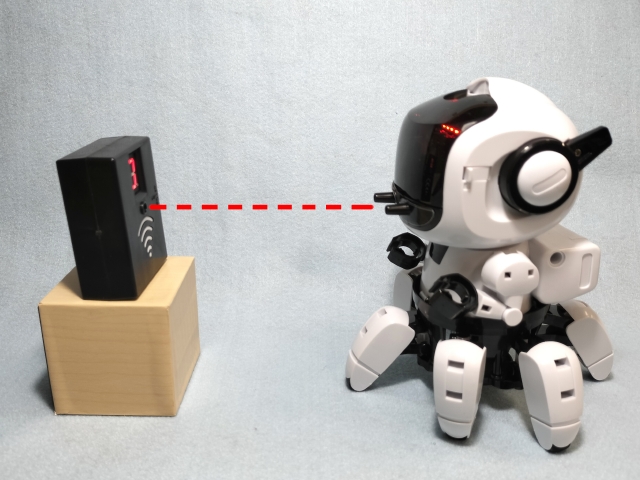


 リモフォロ[MR-9134]
リモフォロ[MR-9134]