オソウジーは障害物やテーブルから落ちそうになることを検出するセンサーに電子回路は使用していません。全てメカの働きで検出をします。
そのため、メカ部が1か所でも正しく組み立てられていない場合、その場でグルグル回り続けるなど正しい動きをしなくなる可能性が高くなります。
例えば、部品どうしを組み合わせるときに下の写真のようにすき間があいているような場合、部品の位置が正しい位置からずれてしまうために正しい動きにならなくなる原因になります。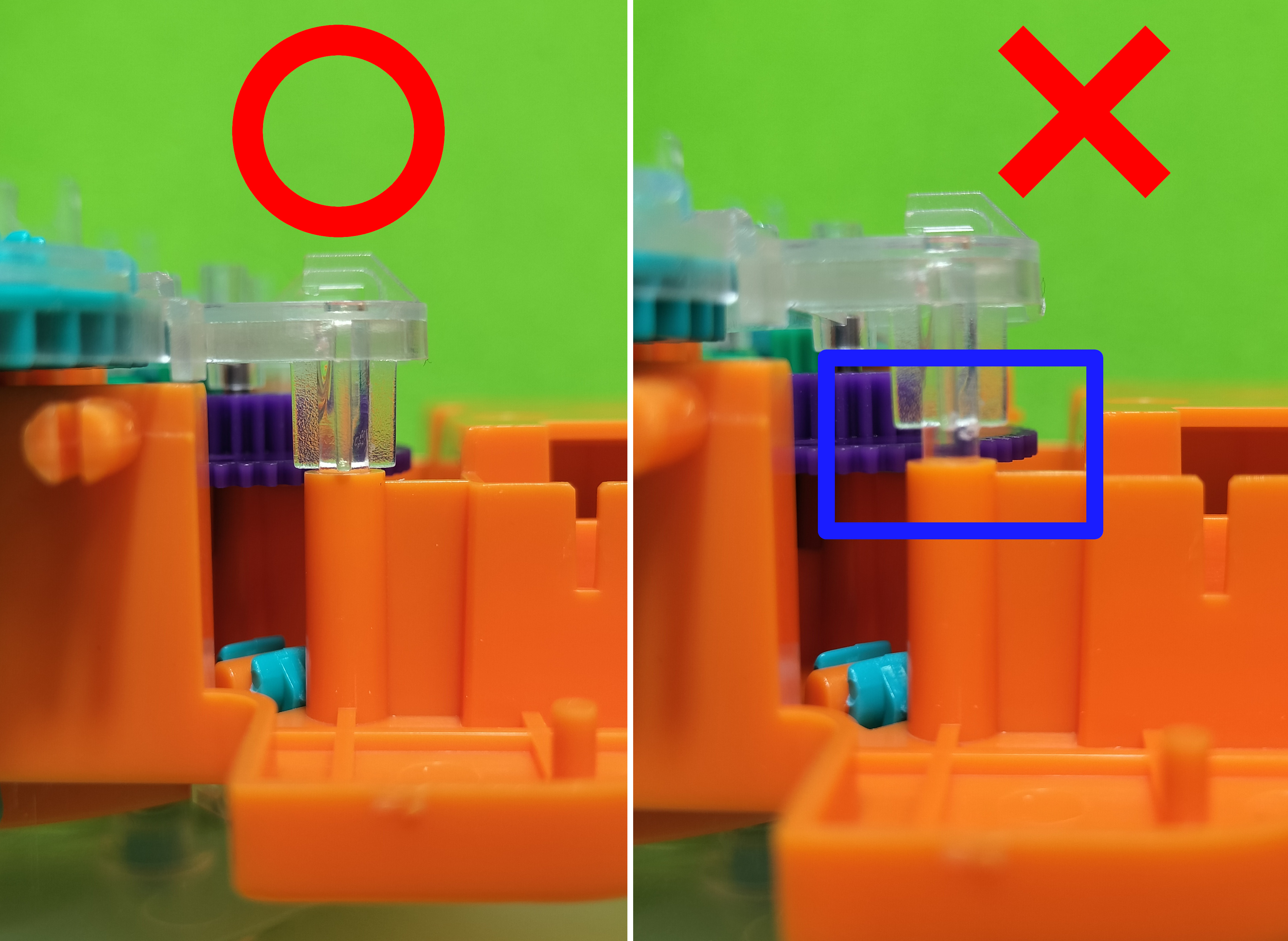
また、説明書で部品を取り付ける際の注意があるものを見落としていたり、したがっていなかったような場合も正常に動作しなくなります。
下の写真は説明書28ページの【7】で部品を取り付ける際の注意事項です。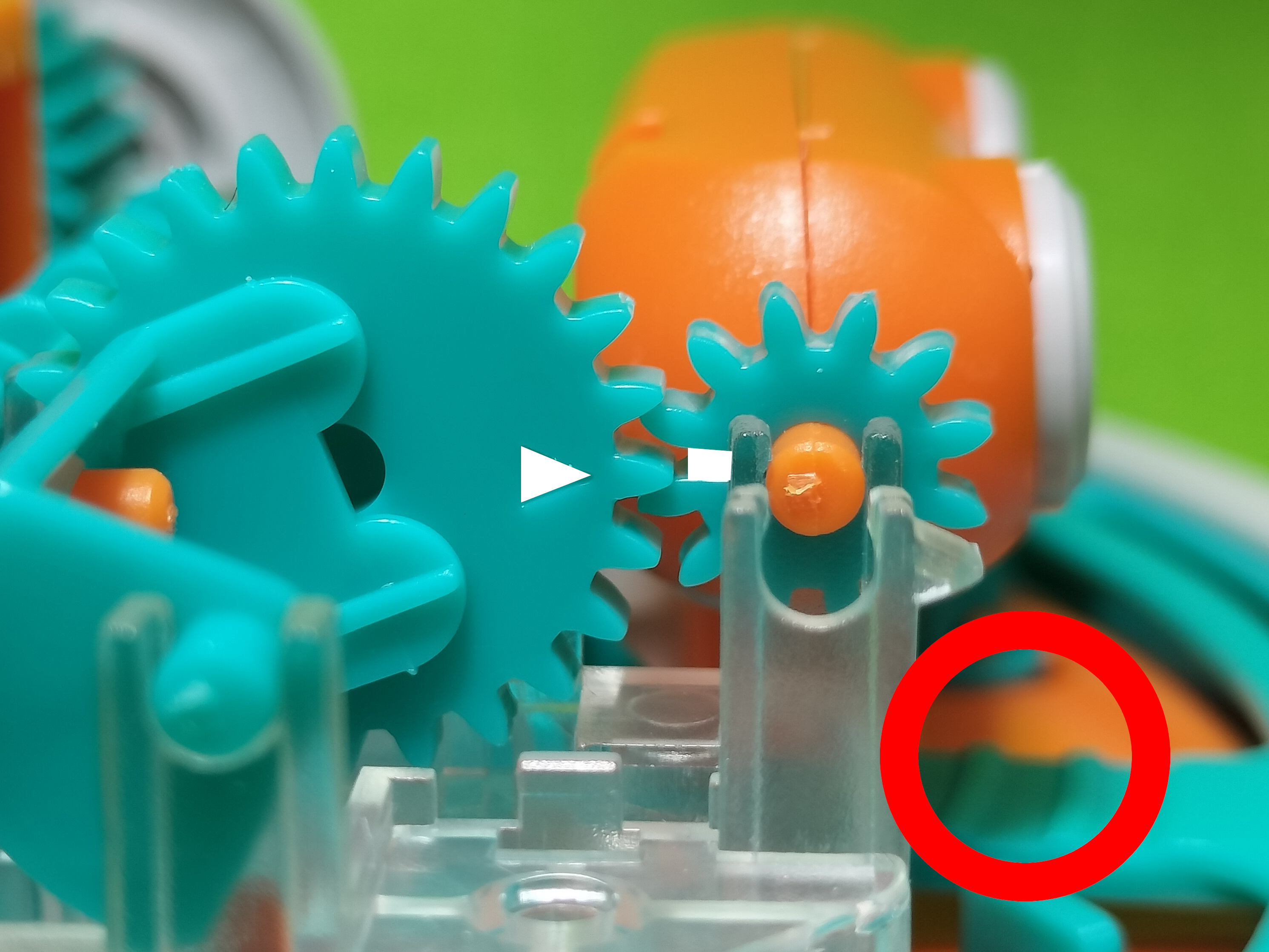

このように組み立て時に部品の向きや取り付け方などが記載されているものは特に注意して組み立ててください。
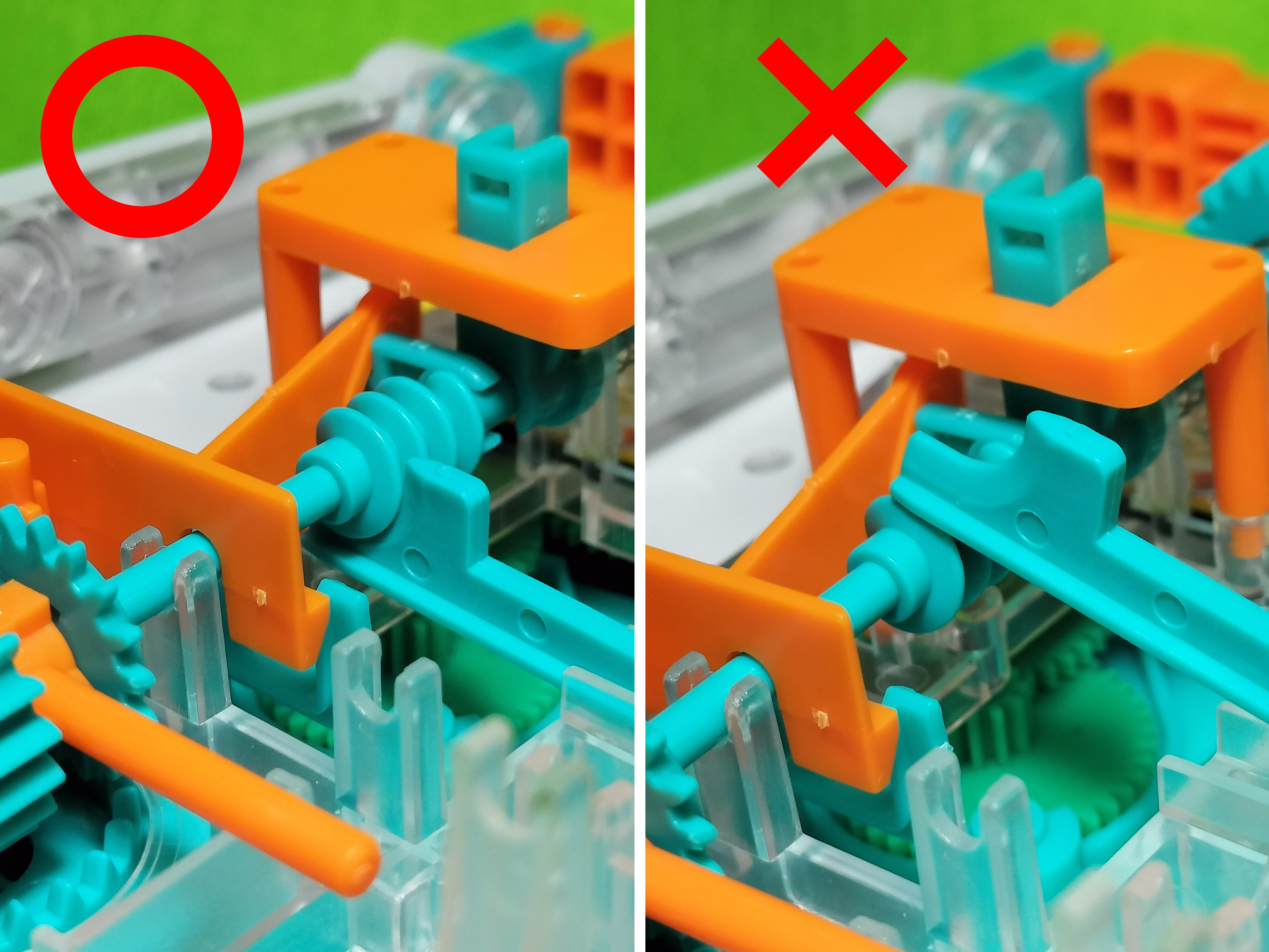
このほかにも衝突センサー自体の組み立ての部品の取り付け方や取り付け位置などが正しくできているかもチェックしてください。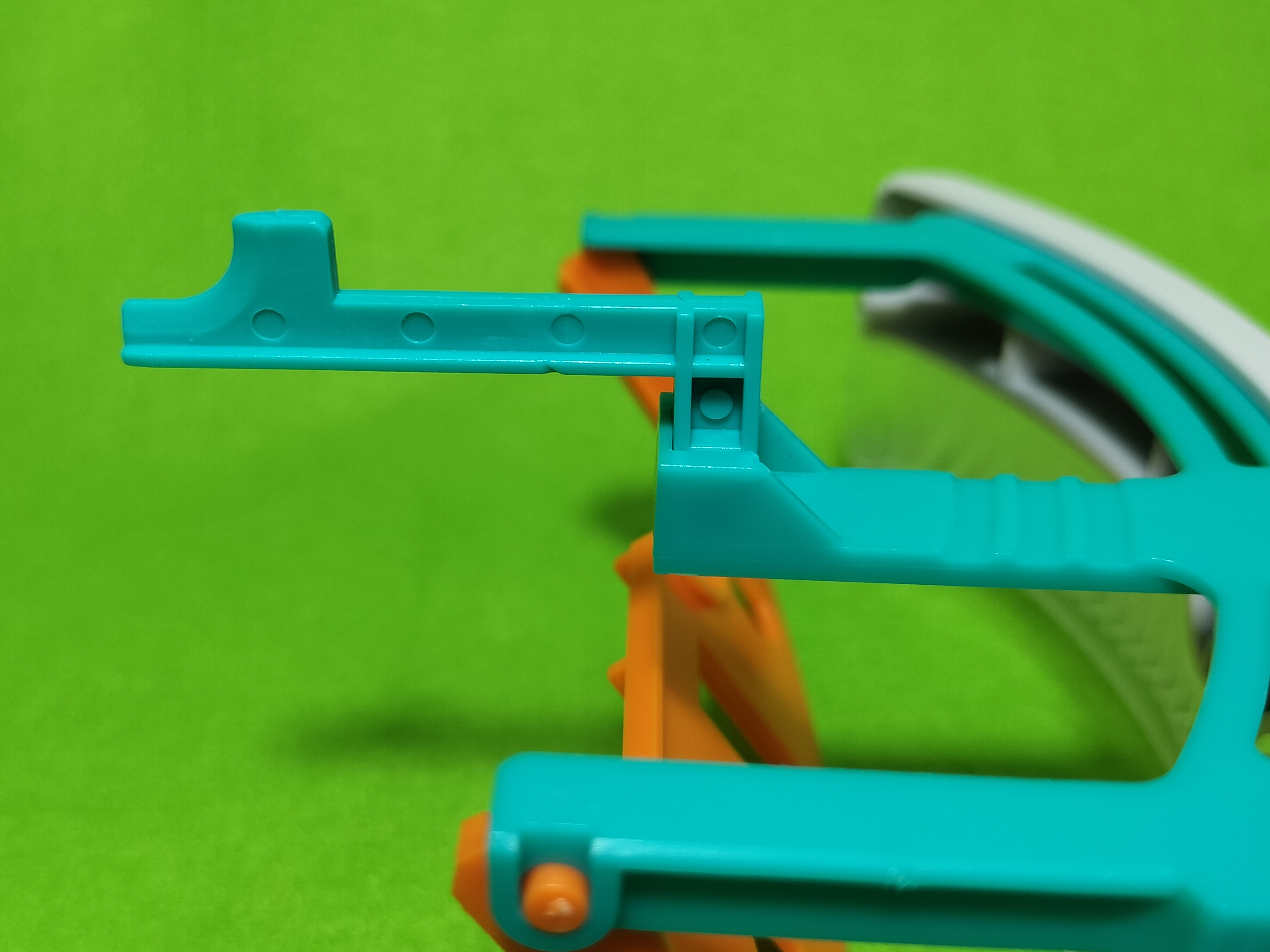

ロボット工作でうまく動かない場合には、
・部品を切り取ったあとの「バリ」が残ってないか。
・ねじが最後まできちんとしめられているか。
・部品を取り付けたとき、さいごまできちんとすき間なく取り付けられているか。
・説明書の注意のとおりに組み立てられているか。
などが正しく動作させるためのポイントになります。
正しく動かないときは、これらもチェックしていてください。
※衝突センサーが障害物等を検出しなくなっても、ギアが切り替わるタイミングにより数回程度センサーが反応しているような動作をする場合がありますが、これは故障ではありません。


 オソウジー[MR-9138]
オソウジー[MR-9138]